Toward Safe Control under Uncertainty: Adaptation and Prediction for Control Barrier Functions
As humans, we walk through life making decisions purposefully or otherwise one step at a time. For many of us, these decisions are solutions to unconscious optimization problems that trade off enrichment (i.e. climb that mountain) with safety (don’t fall off the cliff). Even in the face of staggering uncertainty (weather, wildlife, etc.) we often manage to reach the summit and still make it home safely at the end of the day. How is this possible?
It is through my research on control design for autonomous systems that I seek to answer this question. Though primarily focused on applications of control barrier functions in the context of adaptive and predictive control for safety-critical systems, my work is motivated by the problem of safe control synthesis for uncertain systems in pursuit of satisfying some nominal goal specification. And along those lines, as much as there still is to teach the robotic mind, it may be able to teach us even more about ourselves.
Publications

Safe Control for Unknown Nonlinear Systems with Koopman-based FxT-ID (2023 IFAC WC, under review)

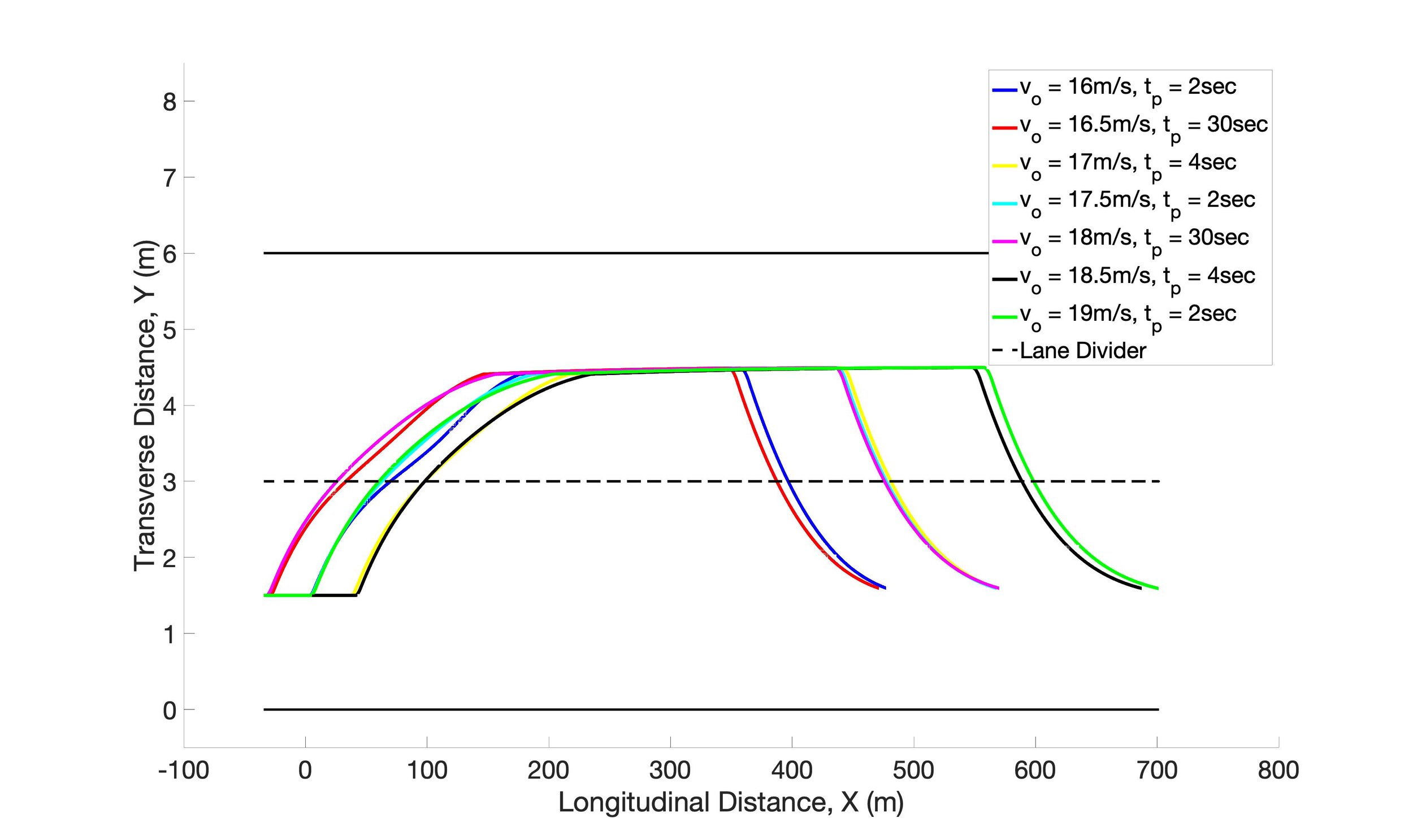
Future-Focused CBFs for Autonomous Vehicle Control (ACC 2023, under review)

Adaptation for Validation of a Consolidated CBF based Control Synthesis (ICRA 2023, under review)

Fixed-Time Parameter Adaptation for Safe Control Synthesis (Automatica, under review)

FxTS Adaptation (ECC 2021)