
A Quadratic Program based Control Synthesis under Spatiotemporal Constraints and Non-vanishing Disturbances
Mitchell Black, Kunal Garg, and Dimitra Panagou
59th IEEE Conference on Decision and Control — 2020
We study the effect of non-vanishing disturbances on the stability of fixed-time stable (FxTS) systems. We first present a new result on FxTS, where we allow a positive term in the time derivative of the Lyapunov function to model bounded, non-vanishing disturbances in the system dynamics. We characterize the neighborhood to which the system trajectories converge as well the time of convergence to this neighborhood, in terms of the the positive and negative terms that appear in the time derivative of the Lyapunov function. We use the new FxTS result in formulating a quadratic program (QP) that computes control inputs to drive the trajectories of a class of nonlinear, control-affine systems to a goal set in the presence of control input constraints and non-vanishing, bounded disturbances in the system dynamics. We consider an overtaking problem on a highway as a case study, and discuss how to setup the QP for the considered problem, and how to make a decision on when to start the overtake maneuver, in the presence of sensing errors.
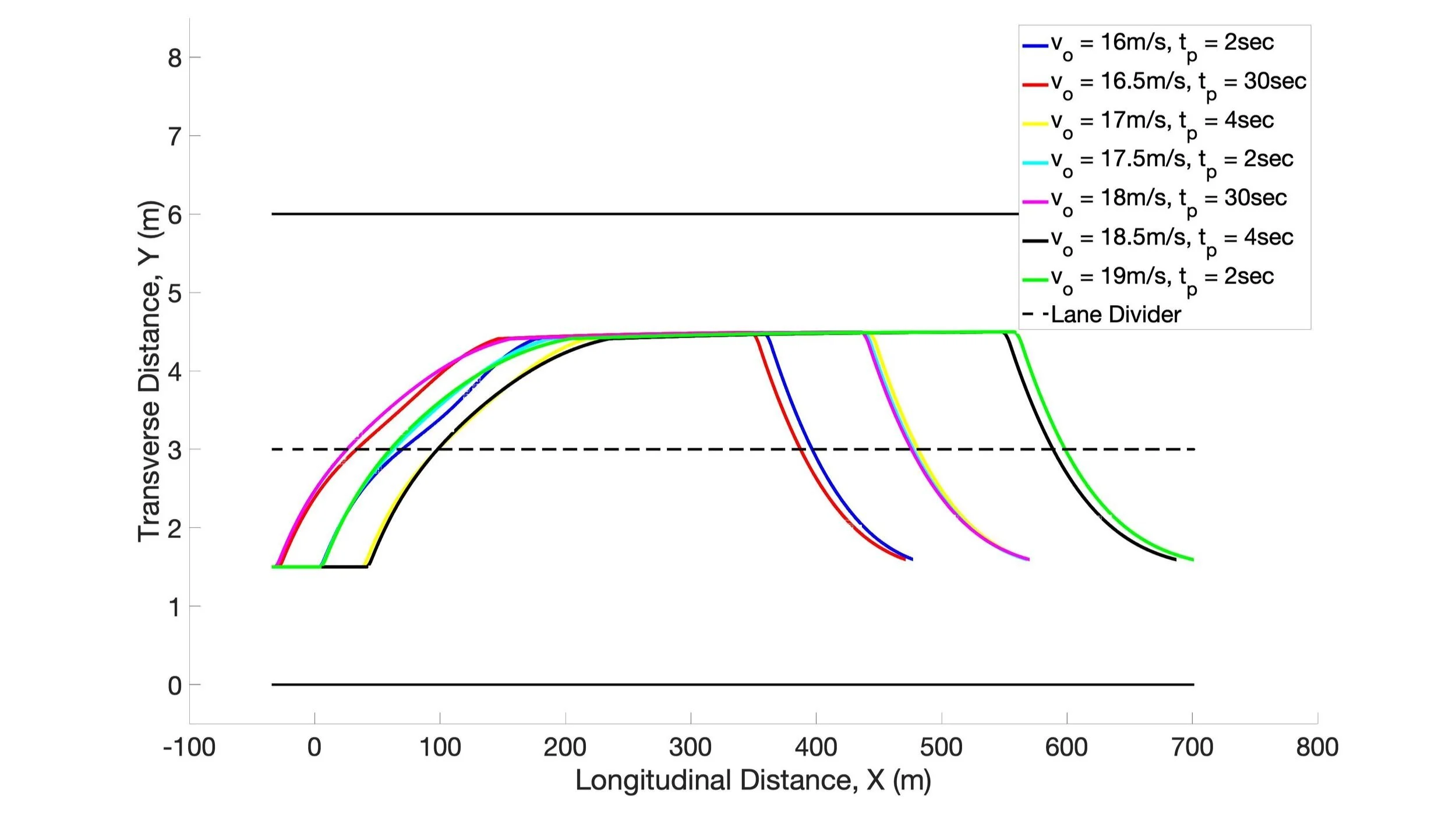
Ego Vehicle trajectories for 7 different initial conditions.

Problem setup for the highway overtake maneuver.

Ego vehicle trajectories for case with 10 different disturbance bounds.







